首页| 新闻| 娱乐| 游戏| 科普| 文学| 编程| 系统| 数据库| 建站| 学院| 产品| 网管| 维修| 办公| 热点
(编辑:武林网)
练就火眼金睛 十一种常见电脑
打印机共享提示“操作无法完成
如何查找有故障的配件
回眸一笑百魅生,六宫粉黛无颜色
岁月静美,剪一影烟雨江南
芜湖有个“松鼠小镇”
小满:小得盈满,一切刚刚好!
一串串晶莹剔透的葡萄,像一颗颗宝石挂在藤
正宗老北京脆皮烤鸭
人逢知己千杯少,喝酒搞笑图集
搞笑试卷,学生恶搞答题
新闻热点
疑难解答
图片精选
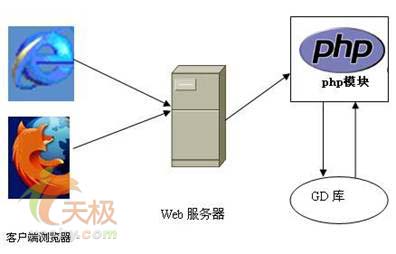
Linux环境下如何使用PHP处理图像
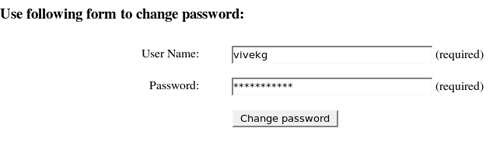
使用PHP脚本修改Linux或Unix系统口
Linux系统怎么为Firefox火狐浏览器
使用WinSCP连接到Linux实现管理的
网友关注